Modeling Jakobshavn Isbr\ae
Goals
- Construct a 2-dimensional model of Jakobshavn Isbræ, West Greenland
- Follow a simple tutorial exercise: create and parametrize an ISSM model
- Use ISSM to invert for a basal friction parameter on a real-world domain
Change into <ISSM_DIR>/examples/Jakobshavn/ to do this tutorial.
Introduction
In this tutorial, we construct a 2-dimensional model of Jakobshavn Isbræ, West Greenland, and use it to invert for the basal friction parameter.
Download
For this tutorial, we will use a dataset from the SeaRISE Initiative: Greenland_5km_v1.2.nc. This data should be saved in the examples/Data directory (see dataset download page).
runme file
The runme.m file in <ISSM_DIR>/examples/Jakobshavn/ is a list of commands to be run in sequence at the MATLAB command prompt. The tutorial is decomposed into 4 steps:
- Mesh generation (anisotropic adaptation)
- Model parameterization (using the SeaRISE dataset)
- Launch of the inversion for basal friction
- Plotting of the results We will follow these steps one by one by changing the selected step at the top in
runme.m.
Step 1: Mesh generation
Open runme.m and make sure that the first step is activated:
steps = [1];
In the first step, we create a triangle mesh with 2,000 meter resolution using the domain outline file Domain.exp. We then interpolate the observed velocity data onto the newly-created mesh. We use these observations to refine the mesh accordingly using bamg. In regions of fast flow we apply 1,200 m resolution, and in slow flowing areas we increase the resolution to up to 15 km:
md = bamg(md, 'hmin', 1200, 'hmax', 15000, 'field', vel, 'err', 5);
Go to ISSM/ and launch MATLAB and then go to examples/Jakobshavn/:
$ cd ${ISSM_DIR}
$ matlab
>> cd examples/Jakobshavn/
Then execute the first step:
>> runme
Step 1: Mesh creation
Anisotropic mesh adaptation
WARNING: mesh present but no geometry found. Reconstructing...
new number of triangles = 3017
Step 2: Model parameterization
In this step parameterize the model. We set for example the geometry and ice material parameters. We use the setmask command to define grounded and floating areas. All ice is considered grounded for now. Type help setmask to display documentation on how to use this command. The model is then parameterized using the Jks.par file. We soften the glacier’s shear margins by reducing the model’s ice hardness, , in the area outlined by
WeakB.exp to a factor 0.3.
Open runme.m and make sure that the second step is activated: steps = [2];
>> runme
Step 2: Parameterization
Loading SeaRISE data from NetCDF
Interpolating thicknesses
Interpolating bedrock topography
Constructing surface elevation
Interpolating velocities
Interpolating temperatures
Interpolating surface mass balance
Construct basal friction parameters
Construct ice rheological properties
Set other boundary conditions
boundary conditions for stressbalance model: spc set as observed velocities
no smb.precipitation specified: values set as zero
no basalforcings.melting_rate specified: values set as zero
no balancethickness.thickening_rate specified: values set as zero
Step 3: Control method
In the parameterization step, we applied a uniform friction coefficient of 30. Here, we use the basal friction coefficient as a control so that the modeled surface velocities match the observed ones. The mismatch between observation and modeled surface velocities is quantified by the value of a cost function. The type of cost function determines to a large degree the result of the inversion process. Different cost functions are available, type md.inversion to see a list of available cost functions:
Available cost functions:
101: SurfaceAbsVelMisfit
102: SurfaceRelVelMisfit
103: SurfaceLogVelMisfit
104: SurfaceLogVxVyMisfit
105: SurfaceAverageVelMisfit
201: ThicknessAbsMisfit
501: DragCoefficientAbsGradient
502: RheologyBbarAbsGradient
503: ThicknessAbsGradient
Inverting for basal drag, we can use the cost functions that start with a 1. The cost functions can be combined and weighted individually:
%Cost functions
md.inversion.cost_functions = [101 103];
md.inversion.cost_functions_coefficients = ones(md.mesh.numberofvertices, 2);
md.inversion.cost_functions_coefficients(:, 1) = 40;
md.inversion.cost_functions_coefficients(:, 2) = 1;
Our cost function is thus the sum of SurfaceAbsVelMisfit'`, the absolute of the velocity misfit, andSurfaceLogVelMisfit’`, the logarithm of the velocity misfit. We weigh the first cost function 40 times more than the latter one.
Open runme.m, make sure that the third step is activated (steps = [3];), then run runme.m:
>> runme
Step 3: Control method friction
checking model consistency
marshalling file Jakobshavn.bin
uploading input file and queueing script
launching solution sequence on remote cluster
Launching solution sequence
call computational core:
preparing initial solution
control method step 1/20
....
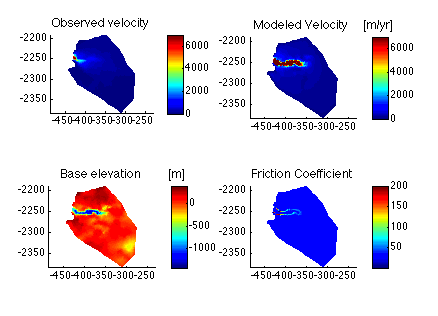
Step 4: Display results
Here, we display the results. Open runme.m and make sure that step number 4 is activated. Your results should look like this: